 |
|
 |
|
 |
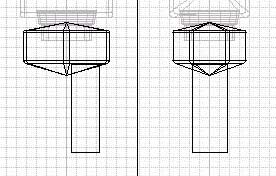
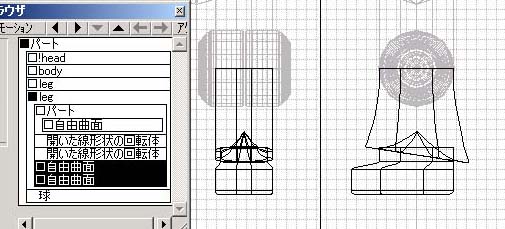
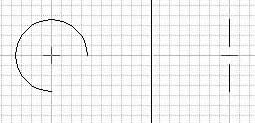
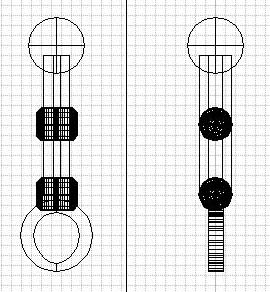
| PART・自由曲面を追加し下の二つの閉じた線形状を移動 |
| 図形の分割です。 |
| 二つの自由曲面を一つのパートに入れておきましょう。 |
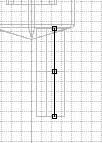
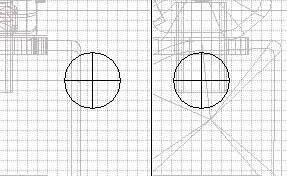
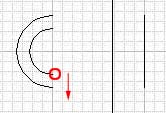
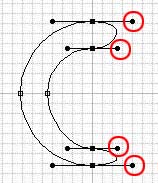
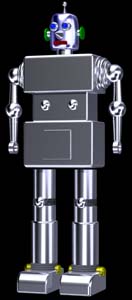
| 脚の裾ラインを前後に拡大・せん断を用いて前上がりにします。 |
| 裾ラインをコピーします。一点に収束 上方に直線移動 |

|
|
 |
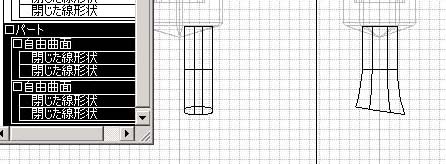
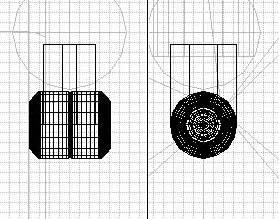
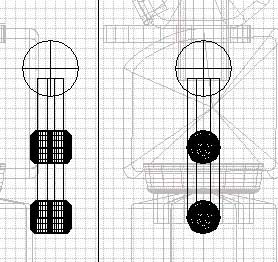
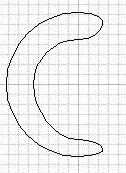
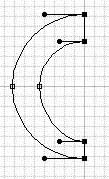
| 足は脚上部をコピーして変形して作りました。 |
| 上図をみながら試行錯誤して作ってみませんか。 |
 |
|
|||||||
 |
|
|||||||
 |
 |
|||||||
|
|
 |
|
|||||||||||||||||
 |
||||||||||||||||||
 |
||||||||||||||||||
|
|
|||||||||||||||||
 |
|
|||||||||||||||||
 |
|
|||||||||||||||||
 |

|
|||||||||||||||||
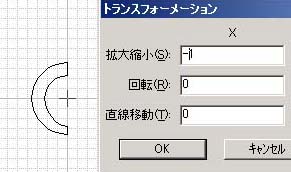
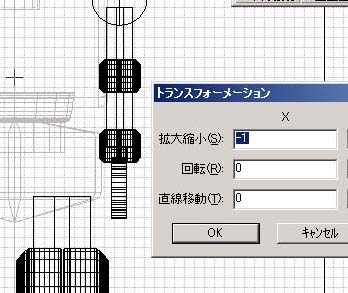
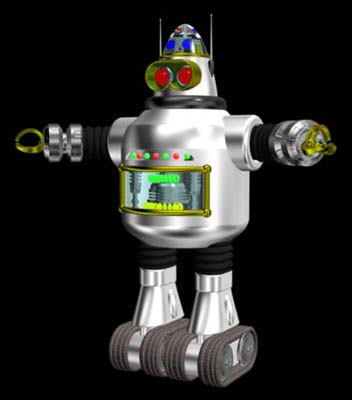
| よくあるミスです。爪の方向を間違えましたMOVE・回転で90度移動して下さい。 | ||||||||||||||||||
| Shiftキーを併用するときっちり90度に回転できます。 | ||||||||||||||||||
 |
 |
 |
| 腕と脚を鏡面コピーしましょう。 | ||
| 好みで色をつけてもいいでしょう。 | ||
 |
|
|
|
 |
|||||||||||||||||||
|
|
||||||||||||||||||||